|
| | Constraint ()=default |
| |
| virtual MagnitudeType | ResidualNorm (const RCP< const Matrix > P) const =0 |
| |
| virtual const RCP< const Map > | getDomainMap () const |
| | The Map associated with the domain of this operator, which must be compatible with X.getMap().
|
| |
| virtual const RCP< const Map > | getRangeMap () const |
| | The Map associated with the range of this operator, which must be compatible with Y.getMap().
|
| |
| virtual | ~BaseClass ()=default |
| | Destructor.
|
| |
| | VerboseObject () |
| |
| virtual | ~VerboseObject () |
| | Destructor.
|
| |
| VerbLevel | GetVerbLevel () const |
| | Get the verbosity level.
|
| |
| void | SetVerbLevel (const VerbLevel verbLevel) |
| | Set the verbosity level of this object.
|
| |
| int | GetProcRankVerbose () const |
| | Get proc rank used for printing. Do not use this information for any other purpose.
|
| |
| int | SetProcRankVerbose (int procRank) const |
| | Set proc rank used for printing.
|
| |
| bool | IsPrint (MsgType type, int thisProcRankOnly=-1) const |
| | Find out whether we need to print out information for a specific message type.
|
| |
| Teuchos::FancyOStream & | GetOStream (MsgType type, int thisProcRankOnly=0) const |
| | Get an output stream for outputting the input message type.
|
| |
| Teuchos::FancyOStream & | GetBlackHole () const |
| |
| virtual | ~Describable () |
| | Destructor.
|
| |
| virtual void | describe (Teuchos::FancyOStream &out_arg, const VerbLevel verbLevel=Default) const |
| |
| virtual std::string | description () const |
| | Return a simple one-line description of this object.
|
| |
| void | describe (Teuchos::FancyOStream &out, const Teuchos::EVerbosityLevel verbLevel=Teuchos::Describable::verbLevel_default) const |
| | Print the object with some verbosity level to an FancyOStream object.
|
| |
| virtual std::string | ShortClassName () const |
| | Return the class name of the object, without template parameters and without namespace.
|
| |
|
| using | MV = Xpetra::MultiVector< Scalar, LocalOrdinal, GlobalOrdinal, Node > |
| |
| using | OP = Belos::OperatorT< MV > |
| |
| RCP< Matrix > | X_ |
| | The constraints matrix.
|
| |
| RCP< const CrsGraph > | Ppattern_ |
| | Nonzero sparsity pattern.
|
| |
| std::string | solverType_ |
| |
| RCP< Belos::LinearProblem< Scalar, MV, OP > > | problem_ |
| |
| RCP< Belos::SolverManager< Scalar, MV, OP > > | solver_ |
| |
| RCP< Matrix > | invXXt_ |
| | Inverse of X*X^T.
|
| |
| RCP< MultiVector > | temp1_ |
| |
| RCP< MultiVector > | temp2_ |
| |
| RCP< MultiVector > | temp3_ |
| |
| virtual void | apply (const MultiVector &P, MultiVector &Projected, Teuchos::ETransp mode=Teuchos::NO_TRANS, Scalar alpha=Teuchos::ScalarTraits< Scalar >::one(), Scalar beta=Teuchos::ScalarTraits< Scalar >::zero()) const |
| | Apply constraint.
|
| |
| void | residual (const MultiVector &X, const MultiVector &B, MultiVector &R) const |
| | Compute a residual R = B - (*this) * X.
|
| |
| RCP< const CrsGraph > | GetPattern () const |
| |
| void | SetPattern (RCP< const CrsGraph > &Ppattern) |
| |
| void | SetConstraintsMatrix (RCP< Matrix > &X) |
| |
| RCP< Matrix > | GetConstraintMatrix () |
| |
| virtual CrsGraph::local_graph_type | FindBlocks (RCP< const CrsGraph > &XXt) |
| |
| void | AssignMatrixEntriesToVector (const Matrix &P, const RCP< const CrsGraph > &pattern, MultiVector &vecP) const |
| |
| void | AssignMatrixEntriesToVector (const Matrix &P, MultiVector &vecP) const |
| |
| RCP< Matrix > | GetMatrixWithEntriesFromVector (MultiVector &vecP) const |
| |
| void | LeastSquaresSolve (const MultiVector &B, MultiVector &C) const |
| |
| void | PrepareLeastSquaresSolve (const std::string &solverType, bool detect_singular_blocks=false) |
| |
| void | PrepareLeastSquaresSolveBelos (bool detect_singular_blocks) |
| | Prepare least-squares solve using Belos.
|
| |
| void | LeastSquaresSolveBelos (const MultiVector &B, MultiVector &C) const |
| | Perform least-squares solve using Belos.
|
| |
| void | PrepareLeastSquaresSolveDirect (bool detect_singular_blocks) |
| | Prepare direct solution of least-squares problem.
|
| |
| void | LeastSquaresSolveDirect (const MultiVector &B, MultiVector &C) const |
| | Direct solve of least-squares problem.
|
| |
template<class
Scalar = DefaultScalar, class
LocalOrdinal = DefaultLocalOrdinal, class
GlobalOrdinal = DefaultGlobalOrdinal, class
Node = DefaultNode>
class MueLu::Constraint< Scalar, LocalOrdinal, GlobalOrdinal, Node >
Constraint space information for the potential prolongator.
This class implements an idea of the constrained space. In energy minimization, constrained space is used simultaneously with the iterative method to construct the final prolongator. The space has two different constraints.
Nonzero pattern constraint
Nonzero pattern constraint means that the final prolongator must have the provided nonzero pattern. This is achieved on each step of the iterative method by restricting the graph of the temporary prolongator to the desired pattern. It is implemented in the Apply function.
- Note
- We do not update the graph of the provided temporary prolongator as this is a very expensive procedure. Rather, we extract its values and replace some of the values of the matrix with the correct graph.
Coarse space approximation constraint
Generally, the coarse space constraint is presented by some matrix (X or Q) (see, for instance, the article by Mandel, Brezina and Vanek '99. It is well known that this matrix can be permuted to have a block diagonal form, where each block corresponds to a row in the prolongator. Specifically, let P be the prolongator, and Q be the constraint matrix. Then the constraint is generally written as \(Q P = B,\) where B is the fine nullspace multivector. Q is a block diagonal matrix, \(Q = diag(Q_1, ..., Q_n)\), where n is the number of rows in P. Each block Q_i is of size NSDim x nnz_i, where NSDim is the number of fine nullspace vectors, and nnz_i is the number of nonzero elements in the i-th row of P.
To constrain the potential prolongator (with correct sparsity pattern, i.e. after the application of the nonzero pattern constraint), one updates its values as
\f[P = P - Q^H(QQ^H)^{-1}QP.\f]
Because of the block diagonal form of Q, this can be done row-by-row.
- Note
- For efficiency reasons, we store
\[(QQ^H)^{-1}\]
in the XXtInv_ array. These matrices are dense, but have small size (NSDim x NSDim).
Definition at line 78 of file MueLu_Constraint_decl.hpp.
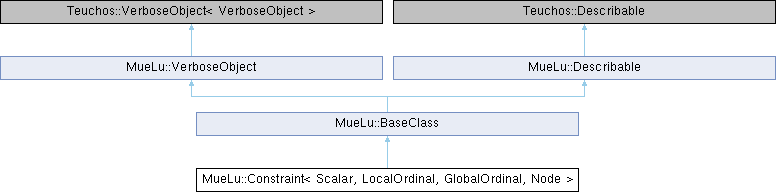
 Public Member Functions inherited from MueLu::BaseClass
Public Member Functions inherited from MueLu::BaseClass